In sports where participants need to use an implement – bat, club, racket, stick etc. – to strike a ball or projectile, the only point of contact that the participant has with the implement is at the grip. Subtle differences in grip forces and wrist positions can affect shot outcomes and a balance must be found between the force required to secure the object in the hand and wrist range of motion, as an increase in grip force produces a decrease in wrist range of motion. Opinions on the best way to grip a golf club vary greatly, with professionals and instructors disagreeing even on basics, such as which hand should control the club throughout the swing.
Measurement of grip force in sports such as golf, however, is not a trivial task. In additon to being accurate, repeatable and provding high spatial resolution, the measurement system must not influence the interface between the hand and the implement nor change the properties or dynamic behaviour of the implement itself. Thin, flexible force sensors offer great potential for such applications as they overcome many of the limitations of traditional sensors such as load cells.
Aim
The aim of this project was to evalaute two different sensor technologies for measuring grip force during a golf shot and comapre grip force profiles across a range of different golfers.
Approach
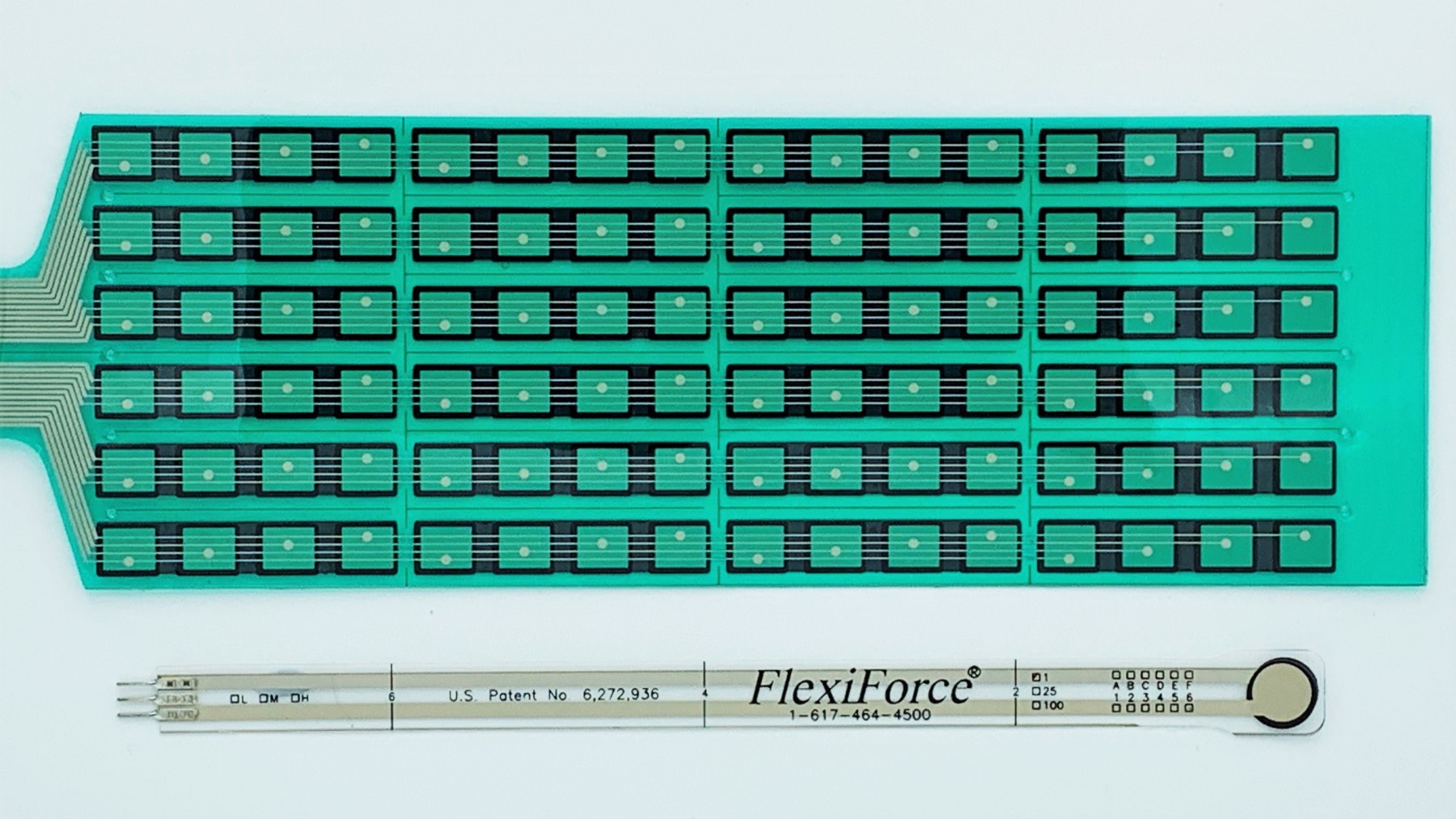
- Two sensor technologies, both manufactured by Tekscan, were selected for evaluation. The 9811 and Flexiforce sensors both contain a semi-conductive ink that changes in resistance with applied load.
- The 9811 sensor has a 6 x 16 rectangular matrix of sensing cells, resulting in a total of 96 sensing elements, and was attached directly to the golf club grip.
- 31 single cell Flexiforce sensors were mounted on two golf gloves, 16 on the left hand, 15 on the right hand.
- Twenty right-handed golfers of varying ability (male and female, handicaps ranging from 0–22, with two players new to the game and without handicap) participated in each test.
- During the test, each golfer hit 10–12 shots with a standard driver in an indoor netted enclosure.
- Impact sound was also measured in order to determine the moment of impact on the force traces.
- Finally high speed video footage of each golfer’s swing was captured to relate features in the grip force profile to key swing events.
Key Findings
- Thin, flexible sensors were found to be suitable for this application of measuring time-resolved force during a golf shot.
- The existence of grip force ‘signatures’ was discovered, i.e. it was found that the forces produced by an individual golfer were very repeatable, but varied considerably between golfers.
- Features in the force data coud be linked to key phases such as top of the backswing, wrist release and impact.
- In the final phase of the downswing, total grip force typically reduced reaching a local minimum close to impact before increasing again afterwards.
Publications
Gallery